Drone control and operation platform aided by 5G communications

The pilot aims to demonstrate how 5G networks and 6G technology serve as a differential element in implementing drone-based services. These services enable dynamic assessment of the operational flight picture through low latency communications, facilitate cloud processing of on-board sensor information (e.g., cameras), and provide a control experience for operators in the loop (HIDL) through advanced cross-platform cooperative interfaces (e.g., multimodal mixed reality on ultrawall, mobile, or wearable devices).
The scenario will address at least one business problem (e.g., infrastructure inspection) involving at least two drones. These drones will fly in a coordinated manner and adjust their flight plan in real-time, based on automatic and semi-automatic decisions supervised and/or agreed upon by one or more operators. These operators, connected through a “tactical cloud” equipped with 5G/6G, will be able to interact with the system through different interfaces. The scenario presents needs for high bandwidth (e.g., in the transmission of high-resolution video for ultrawalls) and low latency, necessary for real-time visualization of the operation, fleet coordination, and multimodal interaction.

- Use Case: Dynamic control of a fleet of drones based on the analysis of their video channels.
- Problem: Drones have low computational capacity.
- Possible Alternative: Processing and control from a centralized platform.
- Requirements: Drone-platform communications must have high bandwidth, high reliability, and low latency.
- Solution: 5G URLLC (Ultra-Reliable Low-Latency Communications).
Preliminary Results
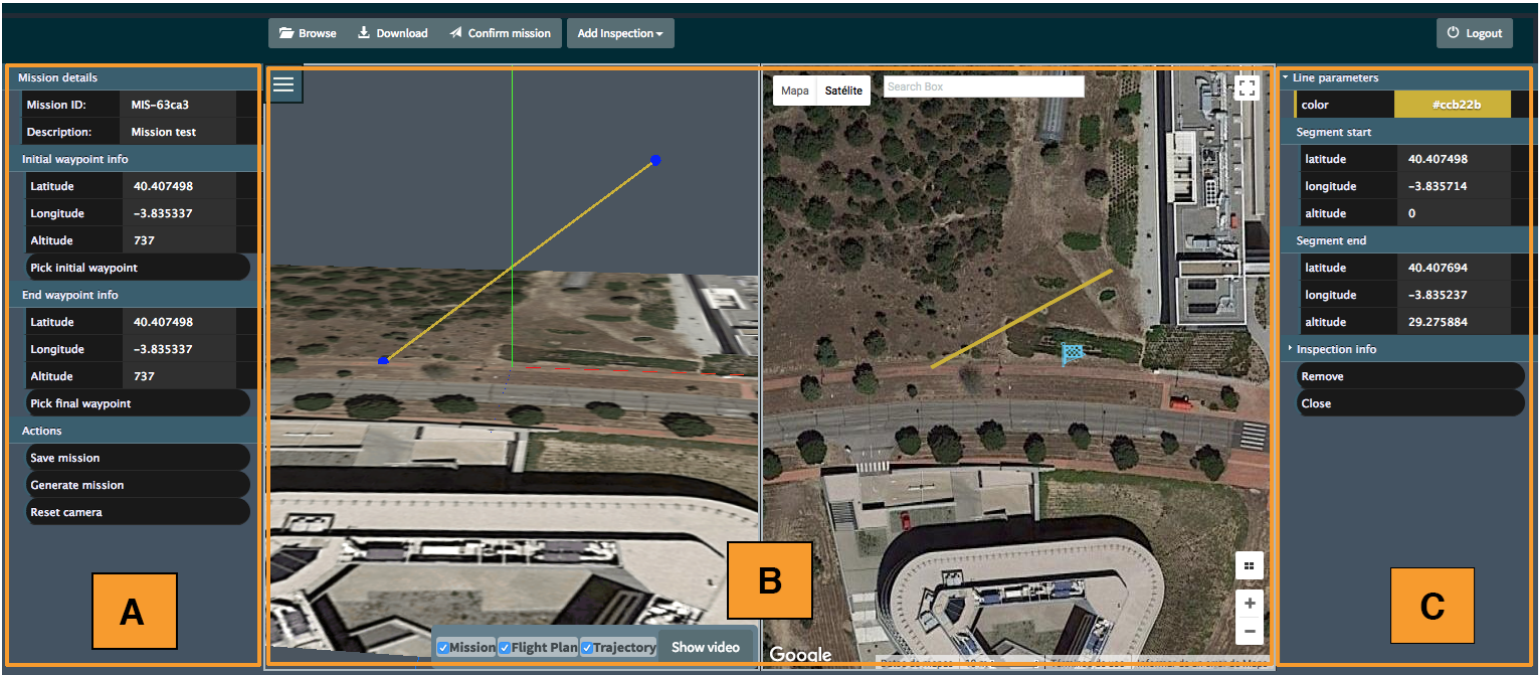
This paper describes a Mission Definition System and the automated flight process it enables to implement measurement plans for discrete infrastructure inspections using aerial platforms, and specifically multi-rotor drones. The mission definition aims at improving planning efficiency with respect to state-of-the-art waypoint-based techniques, using high-level mission definition primitives and linking them with realistic flight models to simulate the inspection in advance. It also provides flight scripts and measurement plans which can be executed by commercial drones. Its user interfaces facilitate mission definition, pre-flight 3D synthetic mission visualisation and flight evaluation. Results are delivered for a set of representative infrastructure inspection flights, showing the accuracy of the flight prediction tools in actual operations using automated flight control.
Drone Flight Planning for Safe Urban Operations: UTM Requirements and Tools
This paper describes the requirements of a flight planning tool for safe urban operations, which may be used to collaboratively design flights considering traffic constraints and limitations according to an unmanned traffic management system. Representative examples of flight planning are described, as calculated by a prototype flight planning tool.



